We envision the next generation of nanotechnology as machines that are active at time and length scales comparable to biological microorganisms. These machines will be able to change shape in fractions of a second in response to environmental cues, carry electronics, be fabricated en mass using standard semiconductor processing techniques, and cost less than a cent per machine. The key breakthrough behind this future? Autonomous origami machines made with atomically thin paper.
In origami robotics, actuators, patterned on a sheet, are used to fold complex, reconfigurable 3D structures. This platform is prime for miniaturization because fabrication can be done in plane with tools like photolithography, designs are scale invariant, and flat panels linked by the folds provide a natural place to integrate electronics.
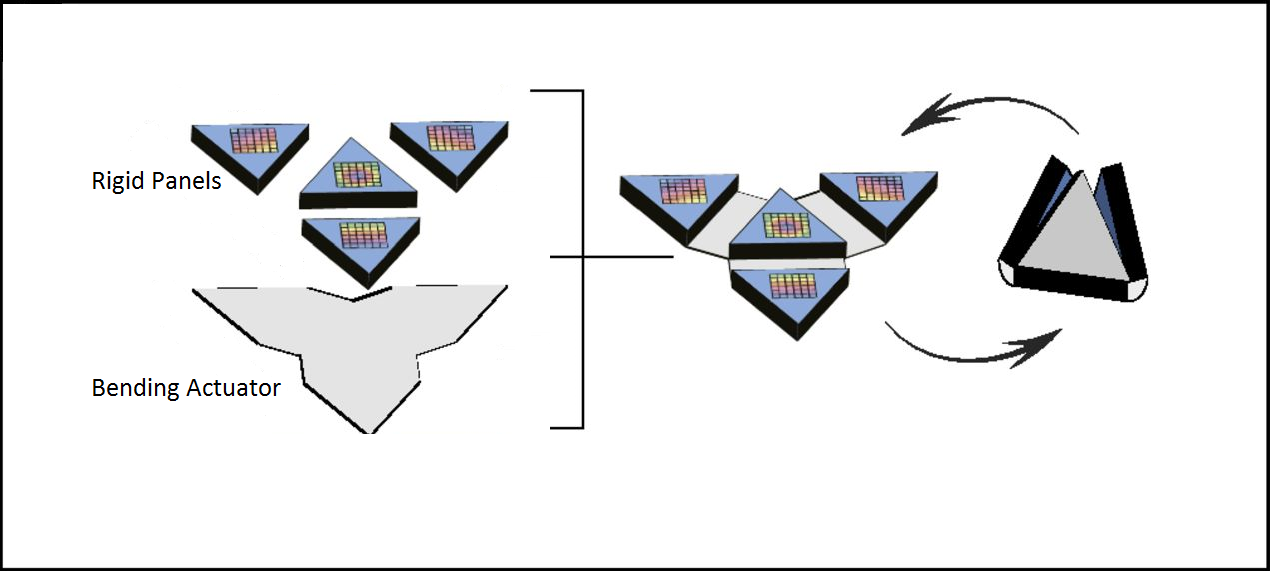
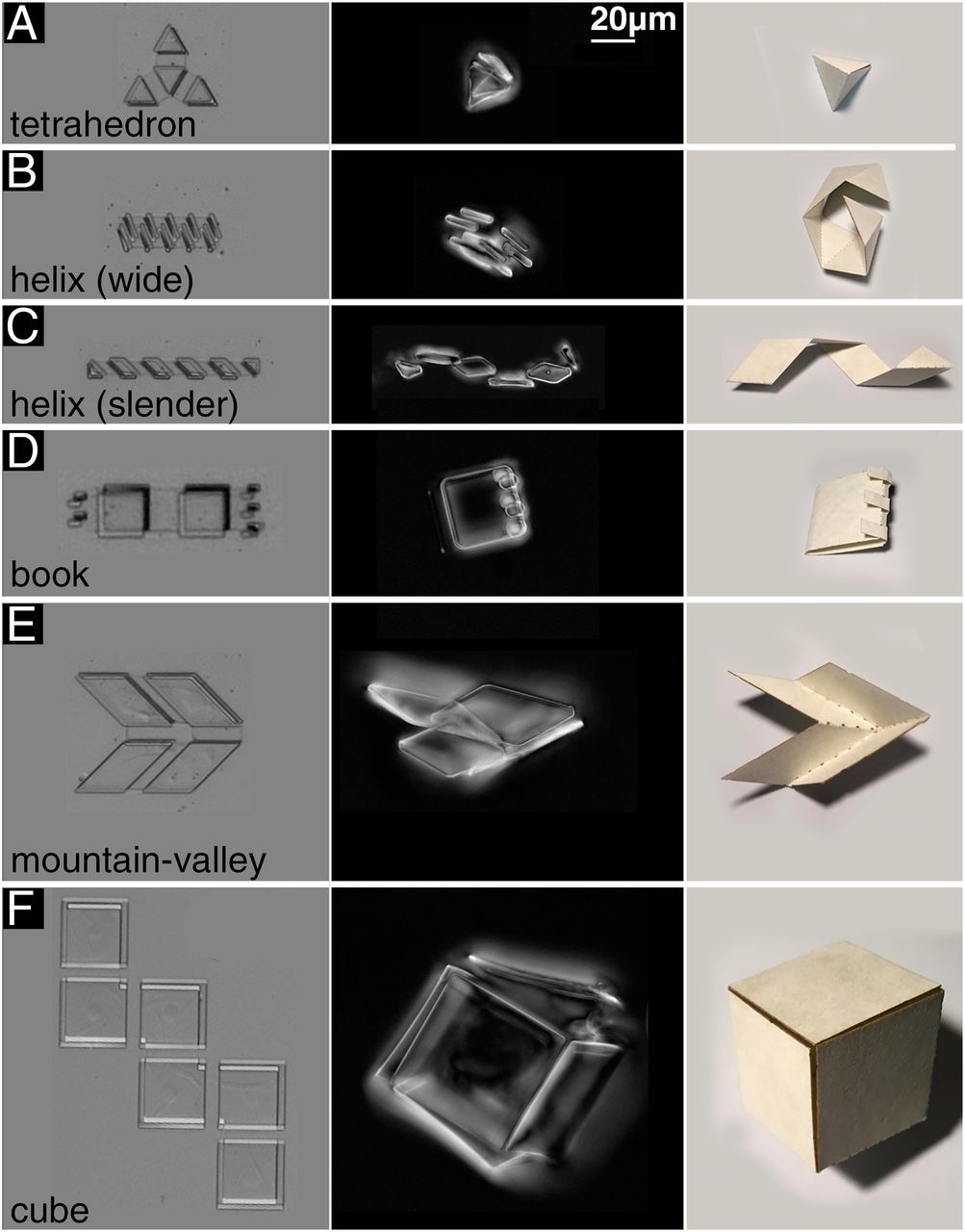
We are shrinking down origami-robotics to become the fundamental platform for nanorobotics by folding sheets of atomic thickness. The most basic challenge to miniaturizing origami robots is in actuator design. A single actuator must be capable of bending to micron sized radii of curvature, producing force outputs large enough to lift embedded electronics, and maintaining electrical conductivity across folds while bending. We bond graphene sheets to nanometer-thick sheets of glass to make ultrathin bimorph actuators meeting all these criteria. These glass-graphene bimorph actuators are capable of bending to micron sized radii of curvature in response to small strain differentials while maintaining their conductivity. By patterning 2-µm-thick rigid panels on top of our glass-graphene bimorphs, we localize bending and produce a variety of folding structures shown below:
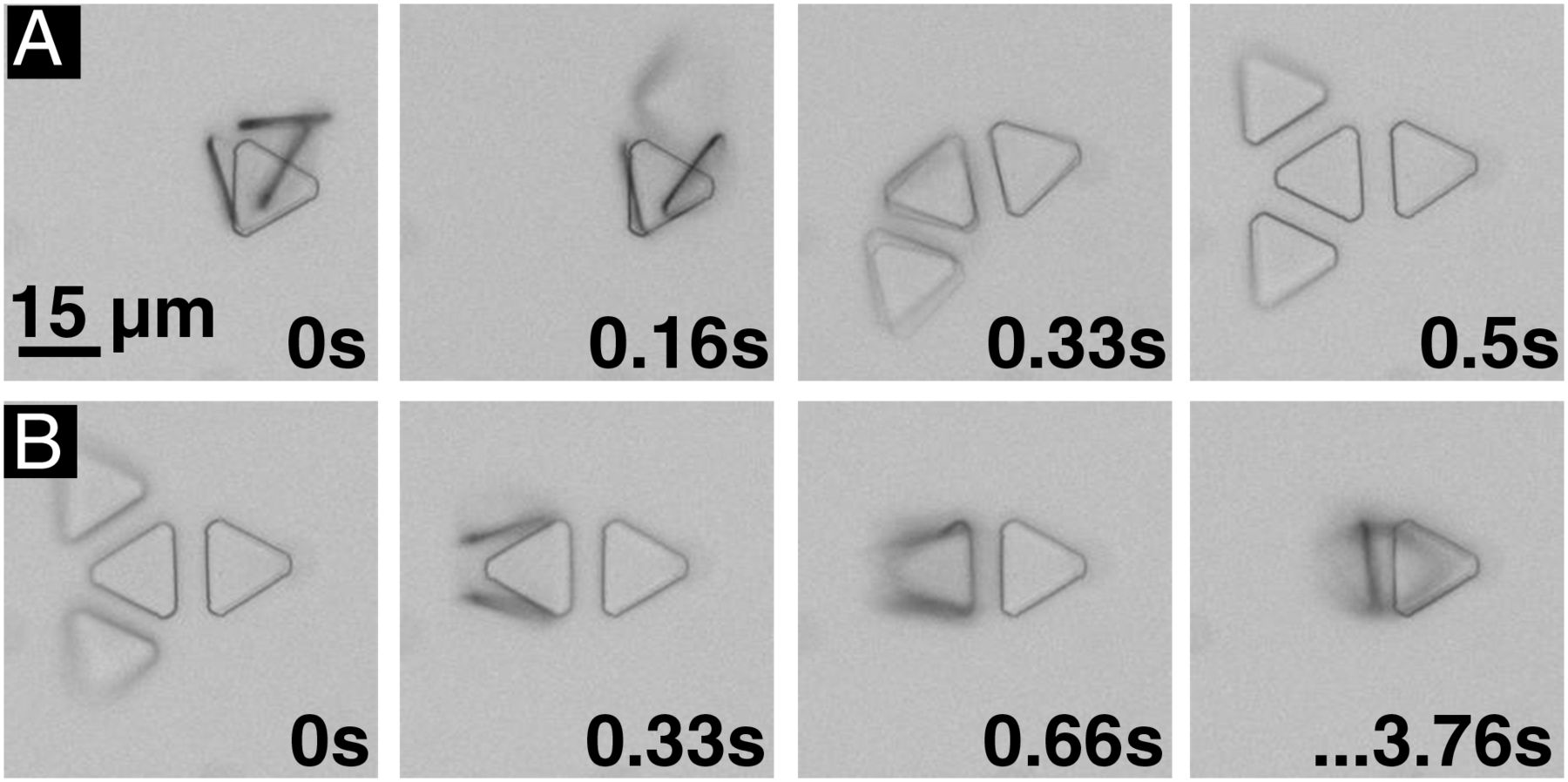
These machines fold and change shape in fractions of a second in response to external stimuli, showing that they sense their environments, respond, and perform useful functions on time and length scales comparable with microscale biological organisms. An example is the micron-sized tetrahedron made by our group, which responds to chemical changes in its environment within milliseconds, unfolding in (A) and folding in (B):
Through integration with currently available microelectronics technologies, these devices can act as exoskeletons carrying the key components for computation, sensing, and communication, forming a cell sized robot. Combining the size and speed of these devices with the capabilities of microscale electronics will open the door to a generation of small machines for sensing, robotics, energy harvesting, and interacting with biological systems on the cellular level.
Read the full article published in PNAS here: https://doi.org/10.1073/pnas.1712889115
Check out this interview on our graphene bimorph based micro-origami machines: