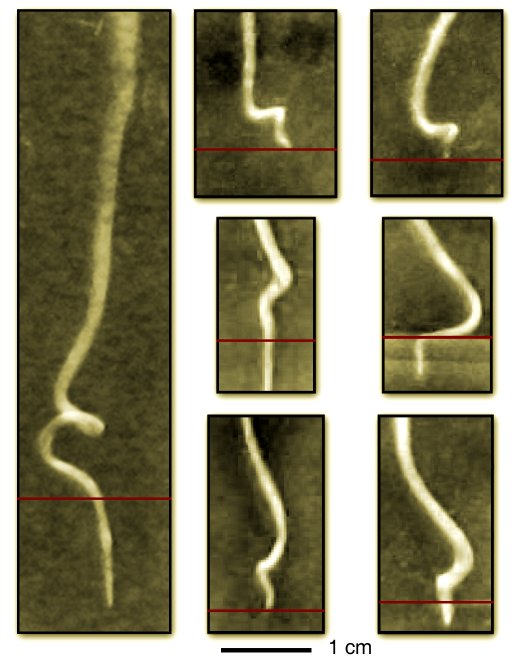
As global climates change, agriculture and crop breeding programs must increase productivity to meet the demands of growing populations while simultaneously facing decreases in soil quality. For example, desertification of topsoil and compactification of subsurface soil produces mechanical barriers to root growth and challenge the ability of plants to find nutrient resources. To explore how plants respond to these growth conditions, we developed a model system consisting of a 3D layered hydrogel. The hydrogel has two layers: A stiff lower layer and a compliant upper layer. Medicago truncatula plants were then planted in the top gel and their growth over the next 100 hours was monitored. Remarkably, we find that Medicago roots developed a helical morphology just above the gel/gel interface before penetrating into the stiff lower layer. This image illustrates both the consistency and variation seen among several plants (red line denotes the interface between stiff and compliant gels):
Staining the roots and imaging them on a confocal microscope reveals that the roots twist around their axes in this helical region but remain untwisted throughout the rest of the root. Further experiments show that this twisting is a biological response of the root induced by longitudinal forces.
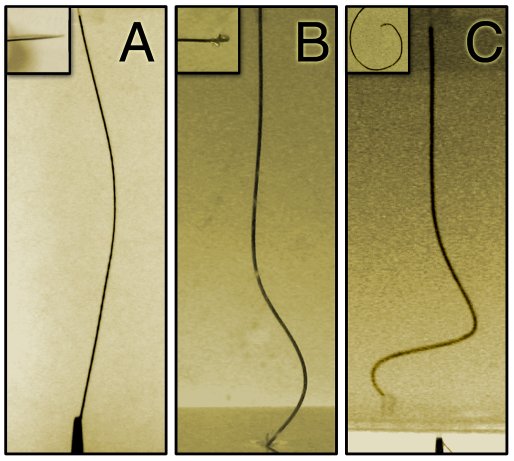
To elucidate the origin and development of this morphology, we use a simple model consisting of a thin rod. (A) We note that if the rod is clamped at both ends and compressed axially, it buckles in-plane. (B) If we take the same rod, embed it in a gel and again compress axially, we find that the buckling is localized near the region where force is applied. However, this geometry remains planar. (C) A morphology similar to that seen in plants can be obtained if we twist the rod while again compressing it. In this case, we find the localized helical buckling reminiscent of our root growth experiments.
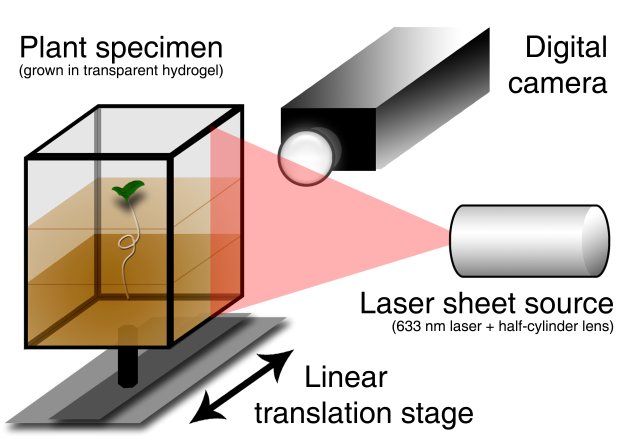
This mechanical model is able to account for the general root morphology, but can it account for root-to-root variations? To address this question, we developed a 3D time-lapse imaging stage to observe growth dynamics and allow us to quantify root structure. In essence, our apparatus combines a laser sheet, a translating stage, and a digital camera to scan the region of root growth and record a series of images that are reconstructed on a computer.
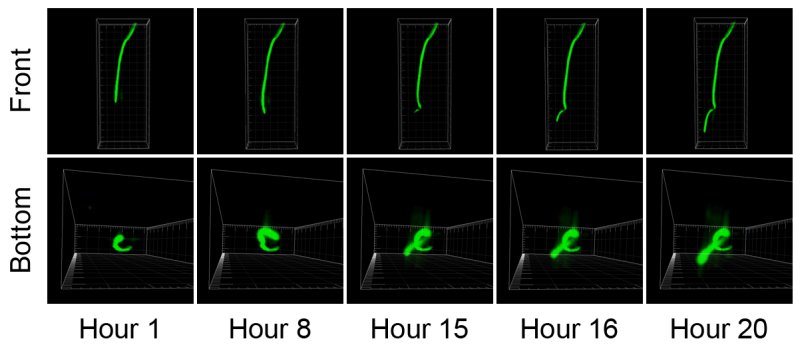
Using this automated system, we were able to directly observe obstructed root growth and the formation of the buckled root morphology. The time-lapse movie shown here illustrates buckling followed by an elastic relaxation of the root-in-gel system that occurs after the root has penetrated into the lower layer.
This time-lapse image sequence illustrates another example of the helical buckling process.
Not all our experiments were successful! In this movie, we see what happens when the top gel is too soft. The root tip gets stuck at the gel/gel interface but is unable to anchor into the top gel. Consequently, the root is forced to spiral around and around…
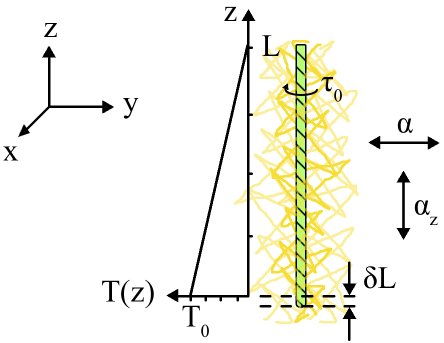
From our 3D scans, we are able to extract the root coordinates and measure the helical morphology. Comparing these data to a mathematical model based on the axially compressed rod model, we find that plant-to-plant variation can be readily accounted for. Specifically, the root radius controls the longitudinal size of the helical morphology, while the force the root tip exerts controls the transverse size. The mathematical model, schematically shown below, illustrates the basic ingredients: A twisted rod embedded in a gel experiences a longitudinally varying compressive force. This compressive force increases with growth and eventually leads to helical buckling.
In all, our results show that Medicago roots, when confronted with barriers, twist during growth to form a “biological spring.” This morphology takes advantage of general mechanical principles enabling them to push off their environment and generate larger forces at their tip. Ultimately this gives plants greater access to nutrient resources as they continue to explore their environment.
More videos are included below:
More videos are included below:
This work was accepted for publication in PNAS, 2012.